AgroFieldDetect ha sido uno de los proyectos seleccionados en la convocatoria de los Premios Cátedra Telefónica de la UEx en 2020 para Proyectos IoT, BigData, Machine Learning y Blockchain para el Sector Agroganadero.
En este proyecto se aborda el desarrollo de un robot para identificar viñedos sobre el terrero utilizando Inteligencia Artificial. El proyecto se plantea como un primer paso hacia un sistema de poda automática.
El proyecto tiene dos vertientes: por un lado la navegación del robot y por otro la detección de los viñedos.
Para la primera parte, estamos trabajando en la integración del sistema RTK-GPS en el sistema de navegación del robot, que está basado en ROS (https://www.ros.org). El objetivo es mantener el sistema de navegación de ROS funcionando para la navegación local (para, por ejemplo, evitar obstáculos imprevistos) mientras que RTK-GPS permite conocer la posición global con precisión centimétrica.
Para desplegar la solución RTK-GPS comenzaremos utilizando la conocida librería RTKLIB (http://www.rtklib.com/) junto con un módulo GPS adecuado, como el de la fotografía, y utilizando la Red Extremeña de Posicionamiento (https://www.rep-gnss.es/).

Las pruebas iniciales las estamos realizando con un robot Turtlebot 2 (https://www.turtlebot.com/turtlebot2/), aunque para las pruebas en campo utilizaremos un robot Summit-XL de marca Robotnik (https://robotnik.eu/es/productos/robots-moviles/summit-xl/), que podemos ver en la imagen.

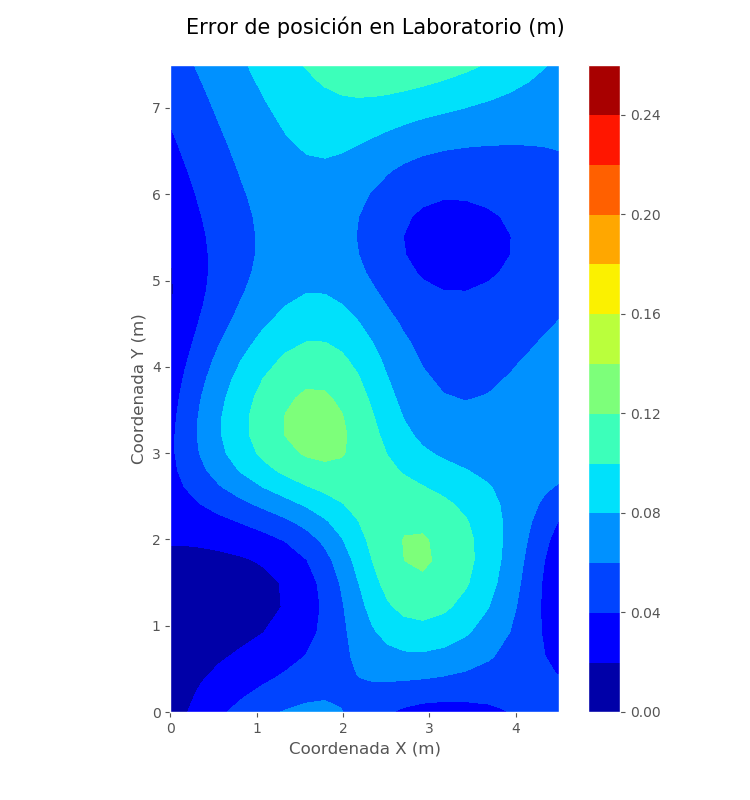
Los resultados preliminares con el robot Turtlebot 2 sobre el laboratorio muestran error promedio de 6 cm en posicionamiento del sistema de navegación del robot, con una distribución del error como se muestra en la figura. Evidentemente, estamos hablando de un entorno controlado y en interior.
La segunda parte de AgroFieldDetect consiste en diseño y entrenamiento de un sistema de Inteligencia Artificial (basado en Deep Learning) para la detección de viñedos. Para ello, elaboraremos una base de datos de imágenes y entrenaremos las redes neuronales utilizando GPUs. Una vez entrenado el sistema, utilizaremos la cámara PTZ del robot como fuente de imágenes para la búsqueda sobre el terreno.
Conforme el proyecto vaya avanzando, seguiremos publicando nueva información sobre dichos avances.